
产品展示
三种联轴器的类型及选用技巧
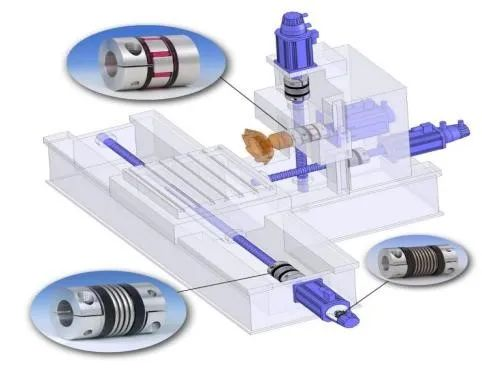
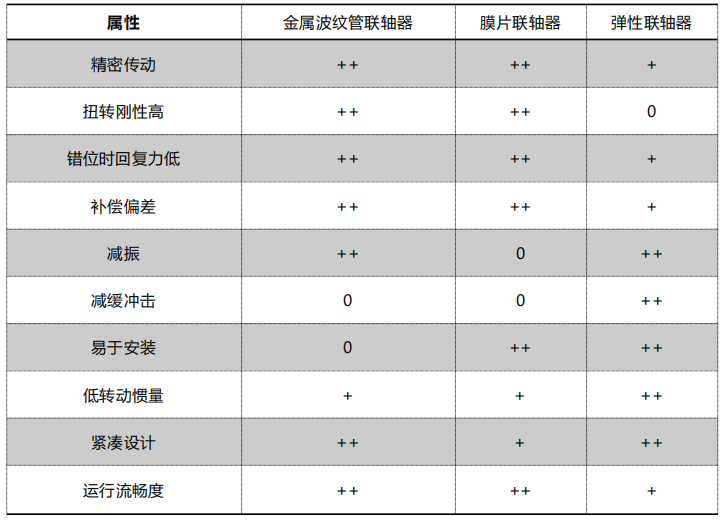
随着技术的革新,最终用户对机床刚度和加工速度都提出了更高的要求,因而机床及其部件的性能表现在日益激烈的市场之间的竞争中显得很重要。除了传动件、机架、刀架和工件夹具,机床上最常见的零部件还包括连接件,如联轴器。这些连接件使机床可以在一定程度上完成最大刚度(金属波纹管联轴器/膜片式联轴器)或满足减振需求(弹性联轴器),具体选用何种联轴器应视场景而异。今天介绍三种不一样联轴器的主要特征和差异。
不锈钢波纹管用于补偿驱动端和从动端之间的机床固有的偏差。这种补偿功能在整个传动系统中起着非常非常重要的作用,使偏差尽可能小的在驱动端和从动端之间传递。具有高扭转刚性的金属波纹管联轴器通常用于机床传动,扭矩范围从0.1N·m到10,000N·m不等,内径范围从3mm到180mm不等。金属波纹管联轴器在旋转过程中具备极高的扭转刚性,这在某种程度上预示着波纹管在扭矩载荷下只会出现极小的形变。通常来说,波纹管的最大扭转角在0.05°~0.1°,但是能通过精压加工实现更高的精度。这一特性使旋转运动从驱动端传送到从动端时可以实现尽可能小的定位误差。
兼具高刚性、高纠偏的特性,又有转动惯量小的特性,符合现代机床的发展趋势和要求;
膜片联轴器一般由一个或多个膜片组和各类型轴套组成,依靠膜片的弹性变形来补偿所连接两轴的相对位移,能补偿驱动端与从动端之间由于制造误差、安装误差、承载变形以及温升变化的影响等所引起的轴向、径向和角向偏移,是一种高性能的金属挠性联轴器。常用于伺服系统中,膜片具有很好的扭转刚性,但转动惯量稍逊于波纹管联轴器。常规产品扭矩范围从25N·m到25,000N·m,最高可达100,000N·m,内孔范围从15mm到200mm。综合来看,膜片联轴器有多种安装轴套及单双膜片组可以选择,既能保证高刚性,又能有一定得纠偏能力,因此是一款非常符合现代机床发展趋势的产品。
弹性体能够提供阻尼效果,同时也能够传递扭矩和补偿偏差。零背隙弹性联轴器的扭矩范围通常从2N·m到25,000N·m不等。内径范围从3mm到170mm不等。减振弹性联轴器能过滤掉机床传动产生的振动和冲击。弹性体利用其弹性缓冲及其材料减振性能来减少和补偿扭矩冲击,同时吸收在驱动端和从动端上出现的振动,从而令整体运行更加平稳。在旋转过程中弹性体的扭转刚性是最重要的,在轴向、角向和径向方向的弹性刚度则应尽可能低,以使传动系统不会因对中受到剪切力的影响。

最高转速可达28000rpm; 高夹持力、高同心度的特性,能够很好保证机床的加工精度;
弹性体的阻尼特性,能够消除驱动端与从动端的部分振动,提高机床的加工精度;
目前市面上还没有适合不同制造商和机床的统一的“通用型”解决方案。这三种联轴器均可用于伺服或步进电机与丝杆之间的连接。根据机床控制、加速度、惯量比、进给螺杆螺距等,由工程师决定和/或由联轴器制造商推荐最适合的联轴器产品,以实现最佳的机械动力。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

基本的隔离开关电源反激变换器(Flyback)工作原理 (电流连续模式)反激变换器(Flyback)工作原理 (电流断续模式)反激变换器(Flyback)工作原理(1)反激变换器(Fly...
基础拓扑(buck boost buck-boost)的电路基础:Buck电路
Teledyne e2v为系统设计师提供的定制方案处理器功耗的背景知识
1.1 通用驱动的功率MOSFET功率MOSFET的栅极氧化层厚度和沟道掺杂
00. 目录文章目录00. 目录01. 概述02. 系统复位03. 电源复位04. 备份域复位05. 预留06. 附录07. 声明01. 概述共有
参见相关说明,或者参见其他帖子。然后下载其中某一个类别的某一个故障数据文件后,文件
的被独立编址的存储器,它们分别为:Flash 程序存储器、内部SRAM 数据存储器和EEPROM 数据存储器[1]。Flash 存储器为1K~128K 字节,支持并行
总线:控制总线,地址总线,数据总线,这些总线统称为系统总线,主要用来与外设交...
本帖最后由 一只耳朵怪 于 2018-5-25 14:55 编辑 DM6446内核有
处理速度;这个速度和频率是对应的吗?由什么决定?最多可以接多少个TVP5146(单片传输速度不够)?
认证方式主要是针对不同类别产品。无线、射频类产品必须申请FCC ID,电脑及电脑周边产品需申请FCC DOC或ID,其它产品一般申请FCC VOC即可。
形式(1)总线接口型:现场设备不具备PROFIBUS接口,采用分散式I/O作为总线接口与现设备连接。这种形式在应用现场总线
启动方式由外部引脚boot0和boot1的电平决定。每个系列boot0和boot1电平对应
BOOT模式介绍.启动,一般来说就是指我们下好程序后,重启芯片时,SYSCLK的第4个上升沿,BOOT引脚的值将被锁存。用户能够最终靠设置BOOT1和BOOT0引脚的状态,来选择在复位后的启动模式。内存
简介主闪存存储器:芯片内置的Flash。SRAM:芯片内置的RAM 区,就是内
一、启动模式(Boot modes)阅读:STM32中文参考手册_V10.pdf 查看启动配置(Boot modes)。在STM32F10xxx里,能够最终靠BOOT[1:0]引脚选择
,网上这部分资料也有许多大神进行总结。但是感觉不是特别深入,因此,小编参考参考了STM32的参考手册进行详细总结了一下。1、STM32的
要用的开发方式,不同的开发方式会导致你编程的架构是完全不一样的。一般大多数都会
要用的开发方式,不同的开发方式会导致你编程的架构是完全不一样的。一般大多数都会
操作模式,包括自动验证模式、手动验证模式和Fly模式。 它们的功能是什么?
本帖最后由 pqwlkh 于 2012-11-28 10:15 编辑 protel *** 一个库安装了
NAND Flash分为SLC(Single-Level Cell)、MLC(Multi-Level Cell)、TLC(Triple-Level Cell)等
控制方式:速度控制方式,转矩控制方式,位置控制方式。大多数人想知道的就是这
工具分别是什么?SD卡有何作用?fastboot是什么?fastboot有何作用?
通的乘积成正比,如果磁通不变的话,就只和电流有关。所以,输出电流的大小只和负载有关。不管变频器频率如何,负载重了,就必须提高转矩来驱动,电流也必然增大;反之亦然。但是变频器通常以下
方法启动Redis,Redis命令使用(干货十足),Redis两种方法设置密码,时间复杂度(更完善哦~)
从串口接收的数据想要存储到一个64k外部数据存储器里面怎么做呢? 另外,就是如何把
做单片机开发时UART,SPI和I2C都是我们最常常使用到的硬件接口,我收集了相关的具体材料对这
LABVIEW 小白 想做一个轴承故障检测系统 要选择轴承内圈外圈滚子
故障计算公式算出的结果 要用枚举控件有人能给编一下吗就类似于用枚举控件选择
控制模式1、力矩控制模式2、速度控制模式3、位置控制模式二、硬件说明1、硬件清单2、硬件连接
的 PDF 文档。仅包含页面图像的文档不可搜索,其包含的文本也不可编辑。包含文本层的文档可以搜索,包含在这些文档中的文本也可进行复制。本文
1.普通模式:在主函数中接收函数2.中断模式:产生的不影响主程序运行3. DMA模式:与主函数互不影响,独立运行本文记录
极管放大电路接法是由输入回路、输出回路中的交流信号来判断的,而不是根据静态工作时的直流中,输入回路和输出回路判断的,是不是?
请问datasheet外部参考电压是不是只有1.024V 1.5V 和2.048V 这
本帖最后由 一只耳朵怪 于 2018-6-13 16:23 编辑 1 在datasheet中提供了
外部参考电压,1.024V 1.5V 和2.048V外部参考电压是不是只有这
,其他的不可以? 参考电压的作用是是什么呢? 是不是用于校正,如果是那如何校正的呢?
安全模式:ZG_SECURITY_PRO_STANDARD(同 ZG_SECURITY_RESIDENTIAL),ZG_SECURITY_PRO_HIGH
应用电路中,运放的两大特点虚短虚断仍然成立吗? 在阻尼振荡器中,工作过程是否按照我描述的这样,在反相输入端加一个近似锯齿波的电流源,正半
电路搞混乱了,请教一下,如图中第一个是真差分电路,第二个是伪差分电路,第
个是单端输入电路,对吗?在将麦克风信号输入到芯片时,伪差分和差分电路实际是通用的吗,还是有差异的?
两轴严格精确对中。 存在某些特定的程度的X、Y方向位移和偏斜角CI。当径向位移较大时,可选滑块
又称联轴节。用来将不同机构中的主动轴和从动轴牢固地联接起来一同旋转,并传递运动和扭矩的机械部件。有时也用以联接轴与其他零件(如齿轮、带轮等)。常由两半合成,分别用键或紧配合等联接,紧固
是一个复杂的过程,这样的一个过程需要仔细考虑力矩、轴的相对位移、硬度、转速、尺寸等要求。为了能够更好的保证